Example 7 - Demagnetization Analysis of a Synchronous Machine
Goal: Evaluate demagnetization behaviour using an advanced nonlinear demagnetization model.
Result: Amount of torque lost with the same current supply, plus visualizations of the magnet damage.
Prequisites
Making sure that a model has already been initialized.
if ~exist('motor', 'var')
Example_01_Setting_up_a_Model;
close all;
end
gmsh path E:\Software\Work\gmsh-4.11.1\ loaded from preference group 'emdtool'
Name Size Bytes Class Attributes
motor 1x1 8 RFmodel
Using an Advanced Material Model
Next, we change the permanent magnet material from the default Material class with its linear magnetization behaviour, to a step more advanced model called the DemagMaterial1.
First, we initialize the material from the already-set linear material, copying all the basic properties.
demag_material = DemagMaterial1().from_material(dim.magnet_material);
Next, we specify the behaviour we want. First, we set the material to use a single analytical exponential-style demagnetization model. While we could explicitly specify a demagnetization curve to use, this is way faster.
demag_material.use_simple_model = true;
Next, in order to model the effect of a short-circuit scenario on the motors subsequent behaviour, we instruct the material to remember any permanent demagnetization it has encountered.
demag_material.retain_state = true;
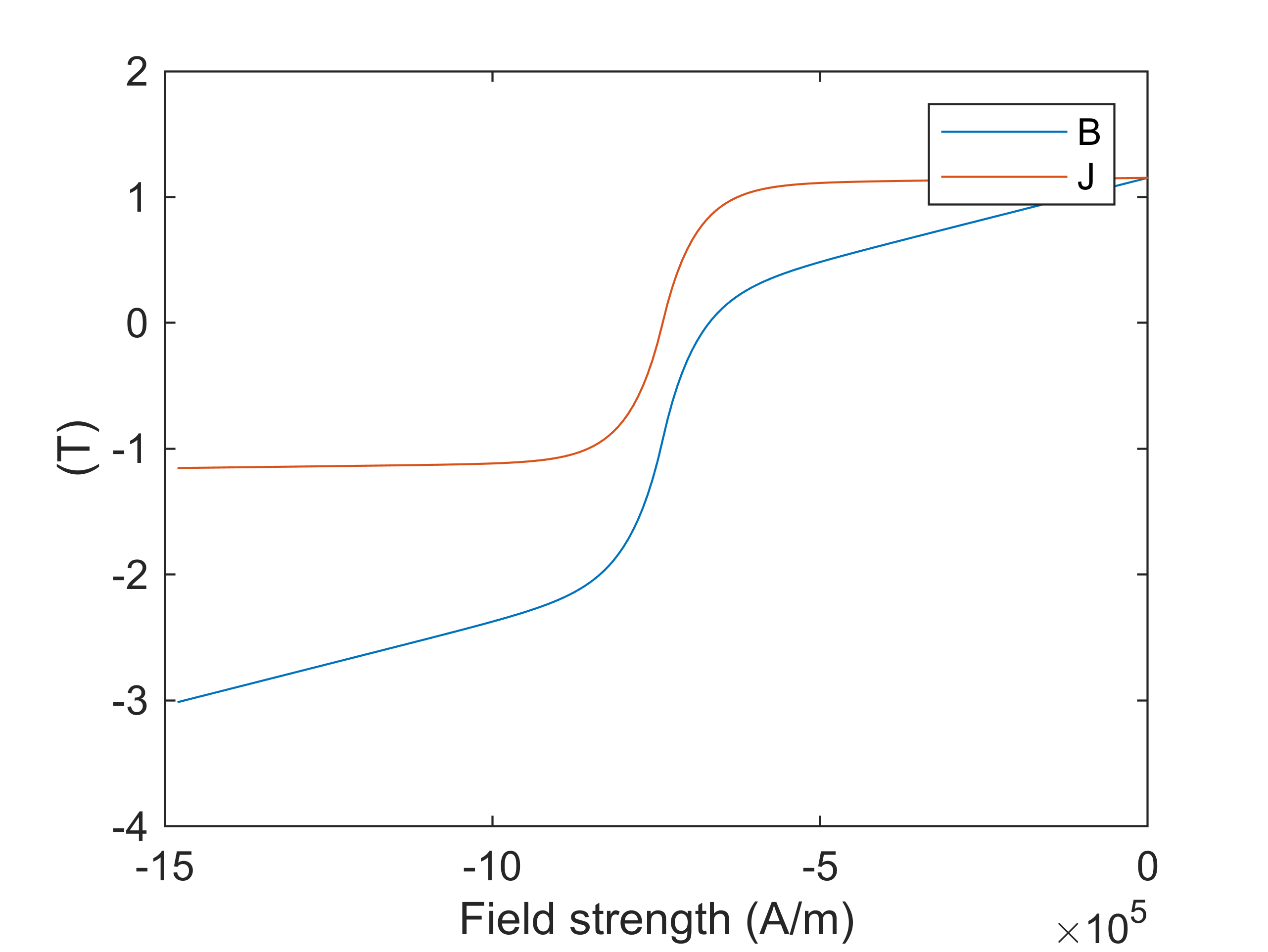
Finally, we visualize the modelled BH and BJ curves. For this, we need to first initialize the simple model for the given rotor remperature. Please note that when initializing a MagneticsProblem object, the model is re-initialized for the rotor temperature seen by the problem at that time.
demag_material.initialize_simple_model(dim.temperature_rotor);
figure(3); clf; hold on; box on;
demag_material.visualize_demag_curve();
Finally, we re-initialize our motor model to use the new material model.
dim.magnet_material = demag_material;
stator = Stator(dim);
rotor = VIPM1(dim);
motor = RFmodel(dim, stator, rotor);
Finally, since the geometry templates normally create their own copies of the materials given, we fetch and re-assign our demag_material variable to point to the object actually used by the model
demag_material = rotor.materials.get(demag_material.name);
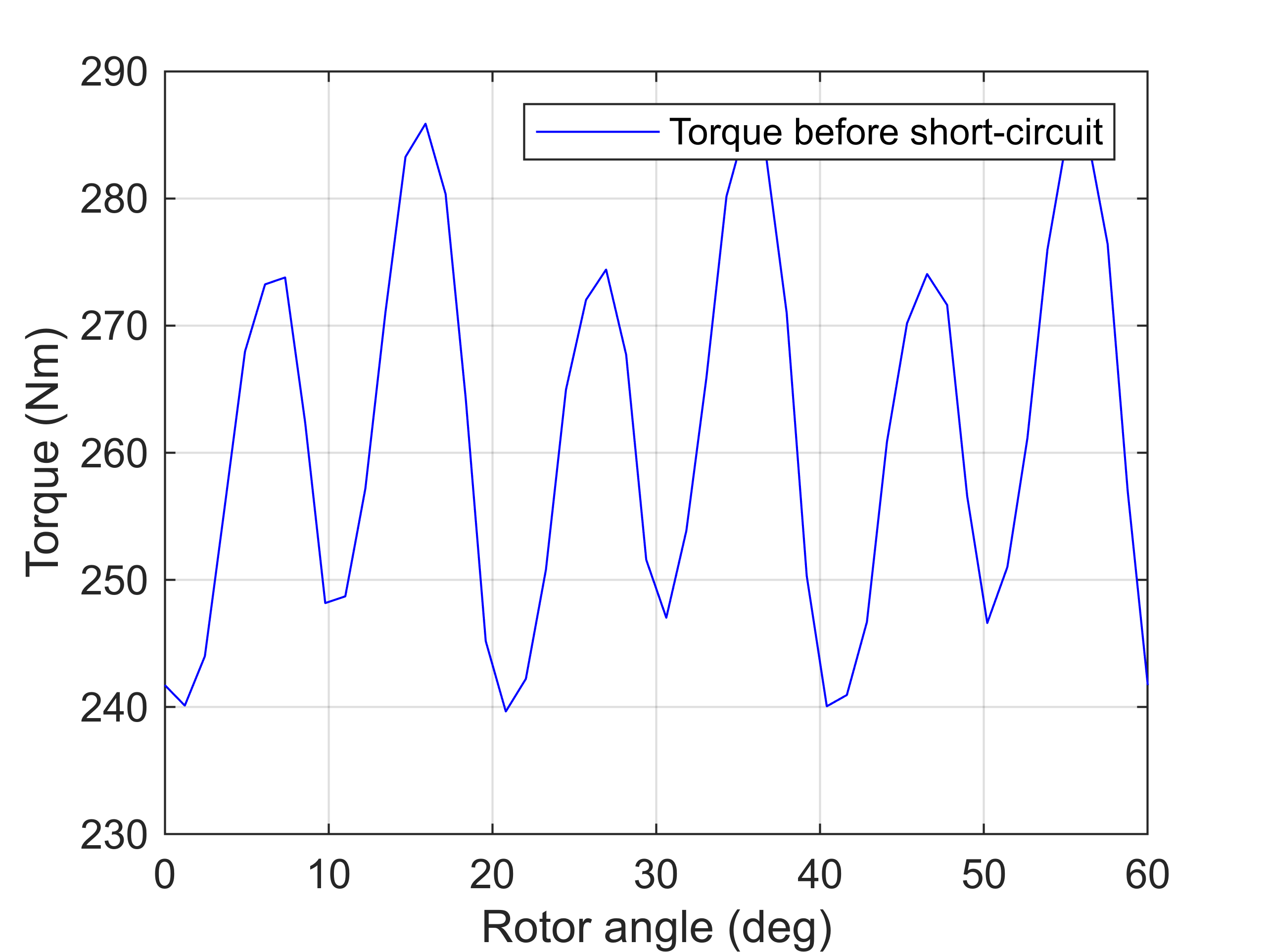
Healthy behaviour
Next, we simulate the behaviour before the short-circuit, computing the torque waveform at a rather large current density, using magnetostatic analysis.
rpm = 5000;
Jrms = 25e6;
%interesting circuits
phase_circuit = stator.winding;
spec = stator.winding_spec;
%initializing problem
problem = MagneticsProblem(motor);
%setting supply
Ipeak = sqrt(2)*Jrms * phase_circuit.conductor_area_per_turn_and_coil();
idq = [0; Ipeak];
angles = linspace(0, 2*pi/2, 50);
Ipeak = sqrt(2)*Jrms * phase_circuit.conductor_area_per_turn_and_coil();
Is_static = spec.xy(idq, angles);
phase_circuit.set_source('uniform coil current', Is_static);
%setting parameters and simulating
pars_static = SimulationParameters('f', rpm/60*dim.p, 'rotorAngle', angles/dim.p, ...
'silent', true);
stepping_solution = problem.solve_static(pars_static);
%computing and plotting the torque
T_before_short = motor.compute_torque(stepping_solution);
figure(6); clf; hold on; box on; grid on;
plot(angles/pi*180/dim.p, T_before_short, 'b');
ylabel('Torque (Nm)')
xlabel('Rotor angle (deg)')
legend('Torque before short-circuit')
Short-Circuit Simulation
Next, we run the short-circuit simulation in the same way as before.
%for improved simulation speed
for c = rotor.circuits
c.enabled = false;
end
%setting parameters
pars = SimulationParameters('f', rpm/60*dim.p, 'N_periods', 1, ...
'N_stepsPerPeriod', 50, 'silent', true);
%current supply, before short
Is = spec.xy(idq, 2*pi*pars.f*pars.ts);
%setting a ShortCircuit source
T_period = 1/pars.f;
source = ShortCircuit;
source.short_at = T_period * 0.2; %instant of the short
%supply-type before the short
source.supply_before_short = "terminal current";
source.supply = Is;
phase_circuit.set_source('circuit', source);
%solution
harmonic_solution = problem.solve_quasistatic(pars);
stepping_solution = problem.solve_stepping(pars);
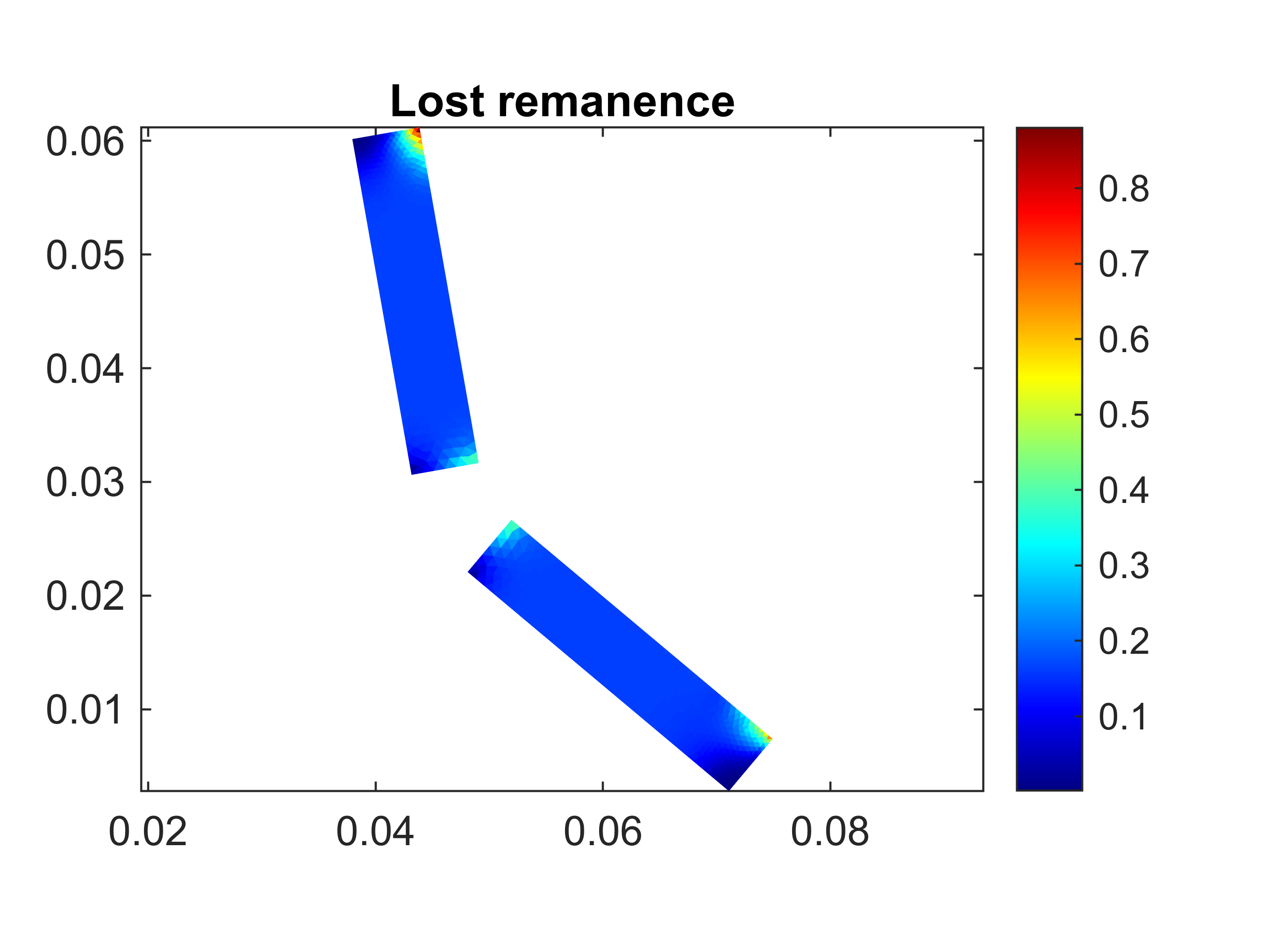
Post-processing
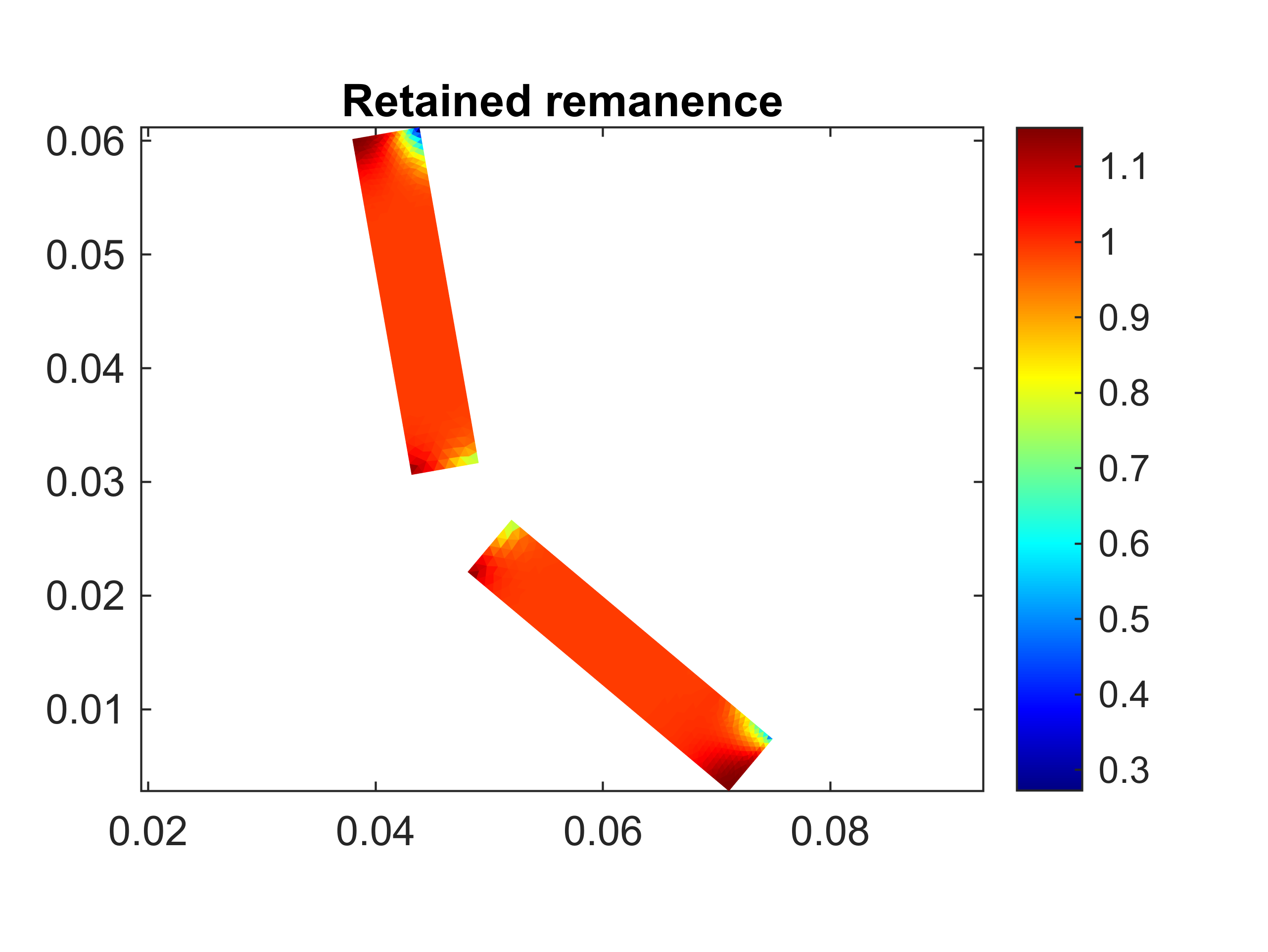
Next, we visualize the damage to the magnets. We plot both the actual remanence retained (i.e. the intersection of the B(H) curve with the H=0 axis), and the difference between the retained remanence and the remanence of a healthy magnet.
figure(4); clf; hold on; box on; axis equal;
title('Lost remanence')
demag_material.visualize_lost_remanence();
colorbar;
figure(5); clf; hold on; box on; axis equal;
title('Retained remanence')
demag_material.visualize_retained_remanence();
colorbar;
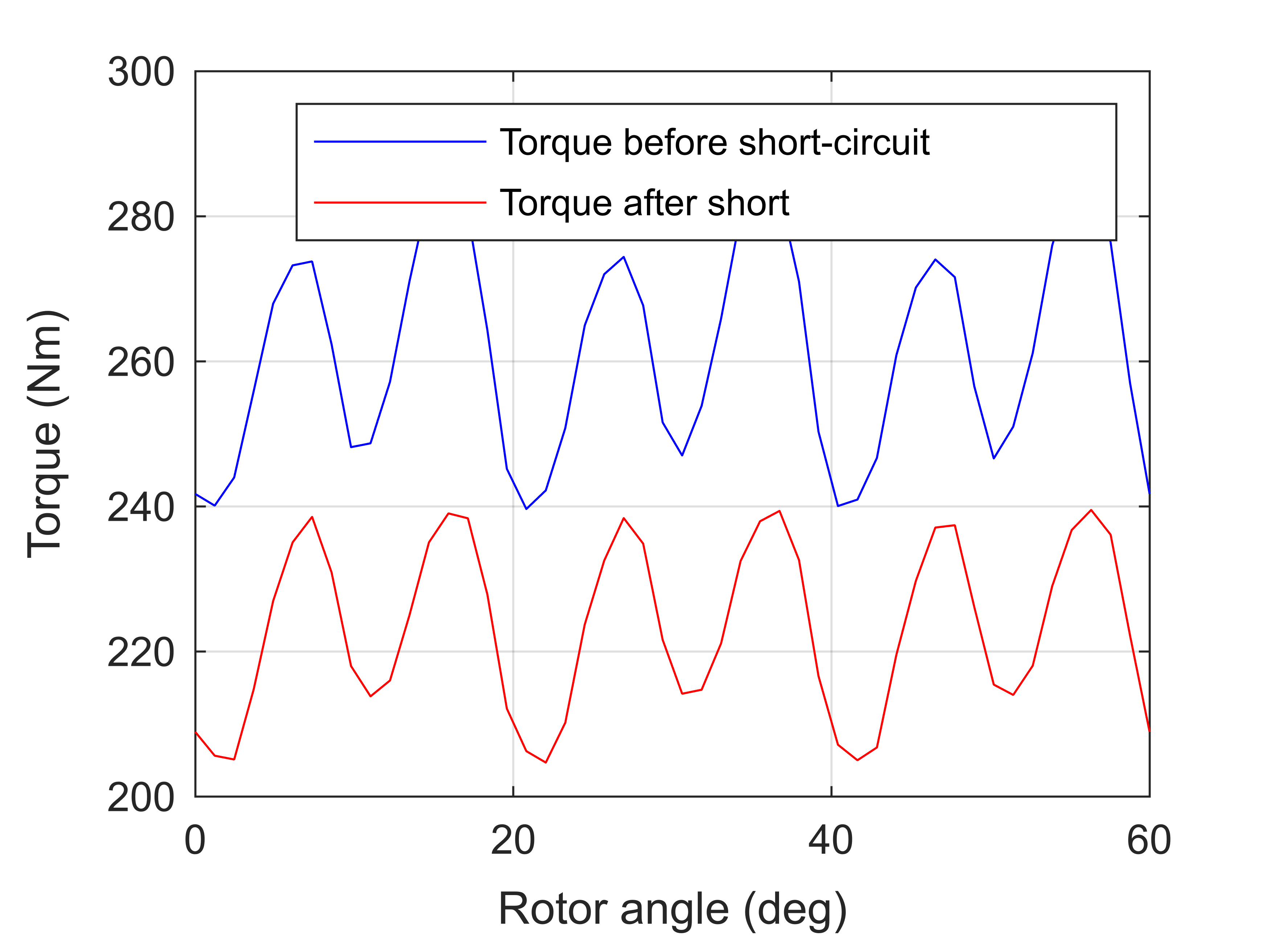
Performance after short-circuit
Finally, we recompute the torque waveform. Since we set the .retain_remanence property to true, the magnet material is now aware of its damaged state, and we see a rather significant loss in torque.
phase_circuit.set_source('uniform coil current', Is_static);
stepping_solution = problem.solve_static(pars_static);
T_after_short = motor.compute_torque(stepping_solution);
figure(6); clf; hold on; box on; grid on;
plot(angles/pi*180/dim.p, T_before_short, 'b');
plot(angles/pi*180/dim.p, T_after_short, 'r');
ylabel('Torque (Nm)')
xlabel('Rotor angle (deg)')
legend('Torque before short-circuit', 'Torque after short')